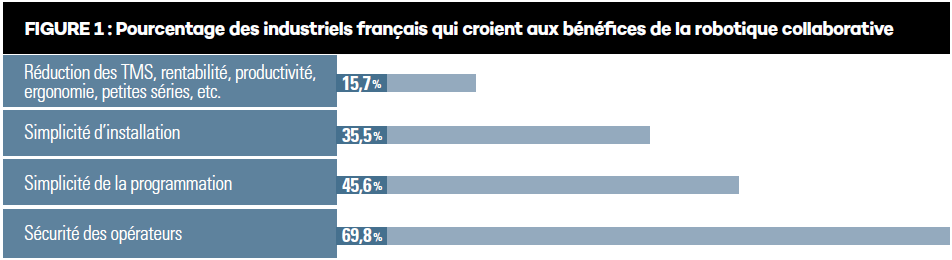
Quels sont les principaux arguments en faveur de l’implantation des cobots en milieu de travail?
Selon une étude quantitative réalisée en 2017 par Fanuc (fabricant de robots) et le magazine L’Usine Nouvelle auprès de 249 dirigeants de l’industrie en France, les industriels croient que les avantages de la robotique collaborative sont séduisants selon quatre principaux aspects.
Qui ne connaît pas les lois d’Isaac Asimov, cet écrivain de sciencefiction qui a inventé le mot « robotique », terme qui sera lexicalisé dès les années 50?
- Un robot ne peut pas porter atteinte à un être humain.
- Un robot doit obéir aux humains, sauf si cela entre en conflit avec la première loi.
- Un robot doit protéger son existence, sauf si cela entre en conflit avec la première ou la deuxième loi.
Bien qu’à l’époque d’Asimov les robots relevaient encore du monde imaginaire, les progrès scientifiques et technologiques des dernières années ont largement dépassé la fiction. Les dernières percées en robotique ont permis la création et le développement de robots collaboratifs qui partagent dorénavant l’espace de travail d’un opérateur. En effet, il ne s’agit plus ici d’un robot industriel conventionnel qui est cloisonné par une barrière physique pour éviter tout risque d’accident et protéger l’opérateur. On parle plutôt d’un robot qui a été conçu pour effectuer une tâche en collaboration avec un travailleur dans une zone de production partagée.
On appelle « cobot » ce type de robot. Le cobot permet, entre autres, de soulager l’opérateur du poids et des vibrations de l’outil. Il permet aussi de multiplier les efforts exercés par l’opérateur (voir : « L’homme au travail et le robot, une relation à inventer », Hygiène et sécurité du travail, no 231, juin 2013). Bien qu’encore marginaux, les cobots seraient apparus au Québec vers 2012-2013.
Les prévisions pour les années à venir laissent présager une forte croissance du marché et de la présence de systèmes robotisés au Québec.
Aussi, cette étude indique que 48,1 % des répondants prévoient investir pour l’achat d’un robot collaboratif d’ici deux ans, alors que 12,1 % des entreprises sondées en possèdent déjà.
Les cobots et la santé et sécurité du travail
Comment peut-on protéger les opérateurs contre une défaillance, une erreur de programmation ou toute réaction fortuite d’un cobot? En ayant retiré tout système de protection autour de l’opérateur, la question devient très pertinente. Pour le professionnel de la santé et sécurité du travail, l’enjeu tournerait donc autour de l’interface personne-machine et de l’ergonomie du système cobotique (voir : Jean-François Thibault, Groupe Safran Paris). D’autres experts croient plutôt que ce n’est pas tant le cobot lui-même qui serait dangereux, mais le risque relié à l’utilisation de celui-ci. Lorsque le cobot fonctionne assez lentement, le risque, ainsi réduit significativement, se situerait plus au niveau de celui qui manipulerait le robot.
Que dit la réglementation au Québec au sujet des cobots?
Pour reprendre textuellement une étude de l’Institut de recherche Robert-Sauvé en santé et en sécurité du travail (IRSST) (voir : Robotique collaborative, R-974, IRSST, mai 2017) :
Dans la section XXI du RSST [Règlement sur la santé et la sécurité du travail] traitant des machines, il n’y a aucune référence à une norme canadienne, européenne ou internationale sur la sécurité des machines. En outre, les termes robots et cobots sont absents de ce règlement. Les entreprises se trouvent donc face à un vide réglementaire lorsqu’elles veulent utiliser un cobot, car la notion de partage de l’espace de travail n’existe pas. Toutefois, les normes existent pour indiquer aux intégrateurs les règles de l’art à suivre en robotique et, plus précisément, en cobotique.
La RIA (Robotic Industries Association) publie également des normes de sécurité sur la sécurité des cellules robotiques. Elle participe également à des comités de développement de normes telles ANSI (American National Standards Institute) et ISO (Organisation internationale de normalisation, en français).
Existe-t-il une norme canadienne?
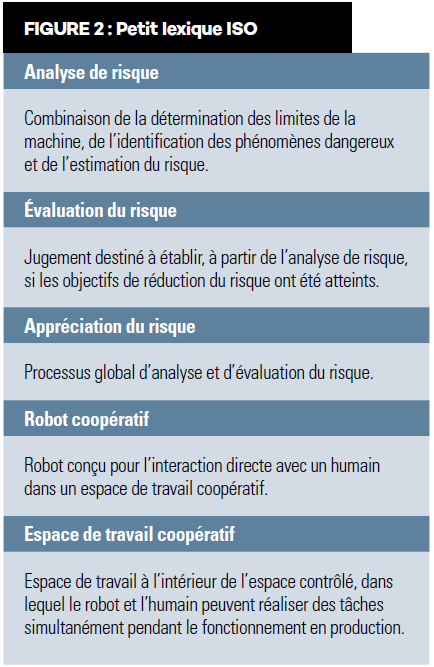
Au Canada, on retrouve la norme CSA Z434-14 (Robots industriels et systèmes robotiques) qui adopte les normes ISO 10218-1 : 2011 (Robots et dispositifs robotiques – Exigences de sécurité pour les robots industriels – partie 1 : Robots) et 10218-2 : 2011 (partie 2 : Système robots et intégration). La norme CSA précise cependant que l’appréciation du risque doit être effectuée par l’intégrateur au moment de la conception du système robot afin de déterminer les exigences minimales de protection et d’élaborer une stratégie globale de sécurité. Elle indique également que cette appréciation du risque doit être basée sur la tâche et se conformer à l’article 4.4.2 de la norme ISO 10218-2, dont l’objectif est de déterminer l’occurrence potentielle de situations de travail par l’identification des tâches effectuées par l’opérateur du système robot et des équipements associés. (Voir figure 2)
De plus, on spécifie que l’utilisateur doit effectuer une appréciation du risque conformément à l’article 4.3 de la norme ISO 10218-2 ou valider une appréciation du risque ou les résultats d’une appréciation du risque fournie avec le matériel livré. Enfin, la norme CSA mentionne que toute modification au système robot qui influe sur les phénomènes dangereux connus et énumérés dans la notice d’instructions doit donner lieu à une nouvelle appréciation du risque. Si les modifications créent de nouveaux phénomènes dangereux, ces derniers doivent être pris en compte dans l’appréciation du risque.
La norme ISO 10218-2 réfère également à la norme ISO 12100 (Sécurité des machines – Principes généraux de conception – Appréciation du risque et réduction du risque). En effet, la cellule robotisée ou la ligne robotisée doivent être conçues conformément à cette norme pour les phénomènes dangereux applicables qui ne sont pas traités spécifiquement dans la norme ISO 10218.
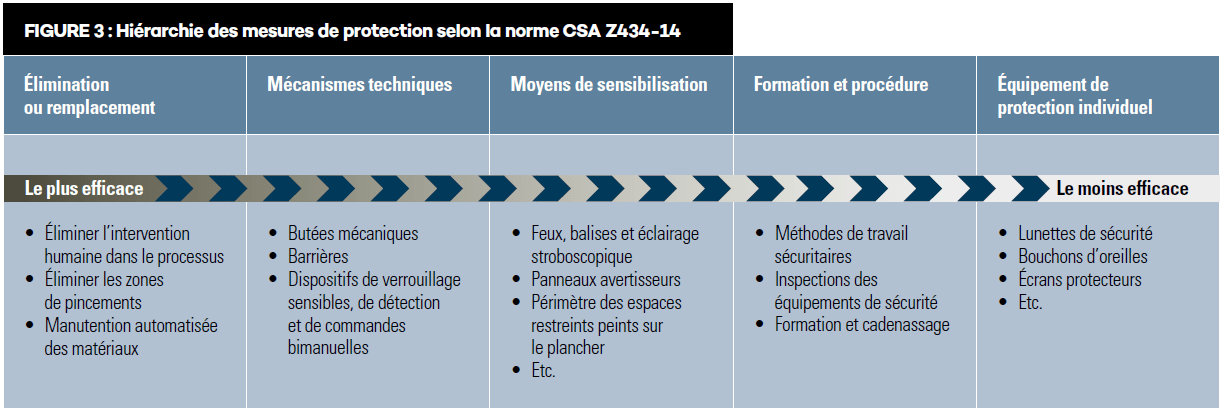
Les nouveaux risques et les mesures de protection
L’étude R-974 de l’IRSST énumère les nouveaux risques suivants :
- risques de collision;
- risques de troubles musculo-squelettiques (TMS);
- risques psychosociaux.
Une distinction importante est apportée dans cette étude. En effet, on ne parle pas ici de nouveaux phénomènes dangereux ou de dommages envisagés. On fait plutôt référence à la fréquence et à la durée d’exposition entre l’opérateur et le robot, qui augmentent la probabilité d’un dommage.
Bien que non citée par cette étude, la malveillance serait à ajouter, étant donné que les cobots seront de plus en plus répandus mondialement. Il est plausible que des pirates informatiques décident de détourner ou de rendre inopérables des cobots pour nuire à l’intérêt de l’entreprise, voire à des organismes gouvernementaux et municipaux. La malveillance pourrait entraîner des défaillances et avoir des répercussions sur la sécurité des opérateurs. À cet égard, les conséquences devraient être prises en compte dans l’appréciation du risque durant la conception des interfaces/logiciels d’exploitation. Bien sûr, tenir compte de ce risque n’est nécessaire que si les cobots sont reliés au réseau informatique de l’entreprise.
Risques de collision
Le risque de collision vient du phénomène dangereux d’une pièce en mouvement, par exemple. Les conséquences possibles pour l’humain sont l’écrasement, le choc (impact) ou encore le cisaillement. Puisque le cobot n’est plus physiquement séparé de son opérateur, on convient que le moyen le plus probable pour prévenir un accident serait de limiter la force d’impact (la vitesse). Aussi, il faut analyser les zones de déplacement du cobot en fonction de l’opérateur, le mouvement de la charge soulevée et la distance entre l’outil d’un cobot et l’opérateur. Il s’agit également de développer des dispositifs de sécurité adaptés, tel un système de vision/ proximité sophistiqué. La tendance actuelle en conception de dispositifs de sécurité est ce que Veo Robotics nomme le « sixième sens », celui de la sécurité du travail. Il s’agit d’une conscience spatiale aiguë de l’environnement de travail, soit une vision à 360o assistée par une caméra (voir : « La sécurité au travail, sixième sens de la robotique », L’Atelier BNP Paribas, mai 2017). Des moyens comme des rideaux de lumière ou des capteurs de présence seraient tout aussi, sinon plus, efficaces, étant plus simples et robustes. Le développement de l’intelligence artificielle pourra sans doute changer éventuellement la donne puisque le cobot pourra évoluer avec l’acquisition d’autonomie et d’apprentissage.
Il faut s'assurer que le cobot ne produit pas de nouvelles contraintes ergonomiques pour l’opérateur. Par exemple, si on prend le cas d’un exosquelette, ce dernier pourrait avoir une incidence physiologique (au niveau articulaire, notamment) et possiblement contribuer à la fragilité ou à la détérioration du système par atrophie ou sousstimulation. On peut également penser que les exosquelettes pourraient favoriser des gestes d’amplitude exagérée ou le maintien d’une posture contraignante de longue durée. On peut également extrapoler sur la possibilité que certains employeurs seraient tentés de modifier la cadence d’une chaîne de montage, par exemple, ce qui aurait pour conséquence d’augmenter le nombre de mouvements effectués par l’opérateur et de sursolliciter le muscle ou l’articulation. D’après les experts, le Québec serait encore loin d’utiliser les exosquelettes dans l’industrie manufacturière.
Risques psychosociaux
Est-ce que l’opérateur serait prêt à partager son espace de travail avec un cobot? Est-ce que l’opérateur le percevrait comme une menace pour son emploi? Est-ce que l’opérateur pourrait se sentir mentalement sous-stimulé en interagissant avec un cobot dépourvu ou ayant peu d’intelligence? Comment l’opérateur percevrait- il le fait que le cobot puisse rivaliser voire surpasser la qualité de son travail? Quelles seraient les incidences sur les relations de travail? Si la vitesse et la cadence étaient modifiées, est-ce qu’elles affecteraient l’opérateur et lui causeraient une surcharge mentale? Est-ce que l’opérateur se sentirait dévalorisé et dépassé par cette nouvelle technologie? Est-ce que l’opérateur perdrait de l’autonomie au profit du cobot?
À ce stade-ci, on ne peut que formuler des hypothèses vu l’absence d’études longitudinales, mais ces interrogations demeurent valables. En effet, elles mettent en relief les enjeux au niveau éthique en plus de celui de la santé et de la qualité de vie au travail. Quelle valeur donnerait-on dorénavant au travail pour l’homme? D’autres argumentent qu’au contraire les cobots ne seraient pas pires que n’importe quel autre équipement automatisé en ce qui concerne les risques psychosociaux. Ils augmenteraient même le sentiment de sécurité.
Mot de la fin
Avec la présence des cobots qui s’imposera sur le marché québécois au cours des prochaines années, il est important de saisir toute l’importance de bien planifier leur implantation. En effet, pour le moment, il est difficile d’évaluer précisément toutes les conséquences que ces nouveaux risques hypothétiques soulèveront en entreprise. En l’absence d’études scientifiques, c’est le principe de précaution qui devrait prévaloir. Par ailleurs, le niveau de connaissances techniques qui sera dorénavant requis pour réaliser une appréciation rigoureuse du risque de façon systémique en milieu de travail exigera l’assistance de services d’ingénierie.
Remerciements :
- Luc Vanden-Abeele, ing., vigie commerciale et technologique chez Symbotic, pour la révision technique et les recommandations.
- François Bouchard, B.ing., spécialiste d’applications technologiques chez F3conseil, pour la révision technique.
- Jean-Maxime Duc, coordonnateur SSE/qualité, et Jonathan Thibault, Group Advisor Ergonomics program, du Groupe Safran, pour les références aux études ergonomiques en cobotique.
- Laurent Giraud, ing., Ph. D., chercheur en génie mécanique à l’IRSST, pour les explications et les références.
Références bibliographiques
- CHARPENTIER, Phillipe et Adel Sghaier (2013, juin). L’homme au travail et le robot, une relation à inventer, Hygiène et sécurité du travail, no 231, p. 84.
- JOCELYN, Sabrina et al. (2017, mai). Robotique collaborative. Évaluation des fonctions de sécurité et retour d’expérience des travailleurs, utilisateurs et intégrateurs au Québec. Institut de recherche Robert-Sauvé en santé et en sécurité du travail.
- FRÉMY, Laura (2017, mai). La sécurité au travail, sixième sens de la robotique, L’Atelier BNP Paribas.
- Universal Robots (2014, 2 juin). The Safe Choice: Universal Robots at Etalex [Vidéo en ligne].
- Alliance canadienne pour les technologies avancées (2017, avril). Le secteur manufacturier avancé. Enquête sur l’automatisation du secteur manufacturier au Québec.
- MORAGUES, Manuel (2017, 11 mai). La robotique accélérée, L’Usine Nouvelle.
- MOULIÈRES- SEBAN, Théo et al. (2016, septembre). La Cobotique : un domaine pluridisciplinaire émergent utile à l’ergonome. Document présenté au 51ème Congrès International Société d’Ergonomie de Langue Française, Marseille, France.
- THIBAULT, Jean-François (2017, 1er mai) (entrevue). Le cerveau d'un cobot est celui de son opérateur Les clés de demain - Le Monde.fr / IBM.





